車輛網絡技術、控制技術的廣泛應用和車輛控制自由度的不斷提高,為車輛智能化技術應用提供了堅實的基礎。多種具備車載應用條件的傳感器逐漸普及,為車輛智能化技術應用提供了豐富的信息。在感知與執行條件具備的前提下,開展車輛決策與控制技術研究,使車輛智能化技術在車輛系統中實現,突破傳統的結構設計和面臨的技術瓶頸,通過智能化技術提高車輛安全、節能、舒適等綜合性能,是目前汽車技術領域關鍵的研究和應用方向。
自適應巡航系統(Adaptive Cruise Control,ACC)在定速巡航系統(Cruise Control,CC)的基礎上,進一步考慮安全性與舒適性,能夠緩解駕駛疲勞,具備廣闊的發展空間。如何合理決策安全跟車距離與安全跟車速度是 ACC 算法開發的核心。
從實際駕駛特性出發,提出一種有效的計算安全跟車距離的算法,基于此開發全速自適應巡航系統,滿足跟起、跟停、跟車、巡航等各種自適應巡航工況,滿足實際駕駛情況的穩定性和舒適性。
1.ACC 系統結構與原理說明
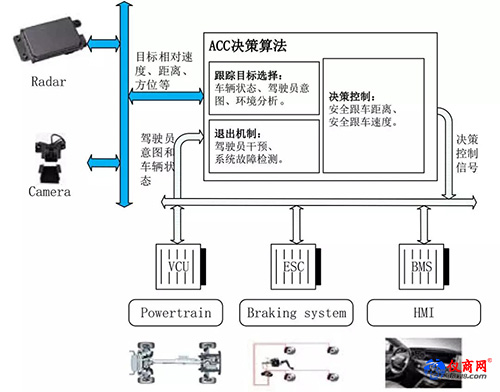
圖 1 ACC 系統結構
注: VCU 為 Vehicle Control Unit,整車控制器; ESC 為 Electronic Stability Controller , 車 身 電 子 穩 定 控 制 系 統 ; BMS 為 Battery Management System,電池管理系統。
ACC系統結構如圖 1 所示,是一種智能化自動控制系統,是定速巡航控制系統的升級。其中,最大區別在于 ACC 以雷達、相機為傳感器,持續掃描車輛前方道路,探測前方障礙物的距離、速度,同時結合駕駛員意圖和自車運動狀態,決策安全跟車距離和安全跟車速度。當與前車之間距離過小時,ACC 控制單元可以通過與制動防抱死系統、發動機控制系統協調動作,使車輪適當制動,使發動機的輸出功率下降,使車輛與前方車輛始終保持安全距離。
2. 基于駕駛員跟車特性的自適應巡航算法開發
2.1 ACC 系統中安全跟車距離計算
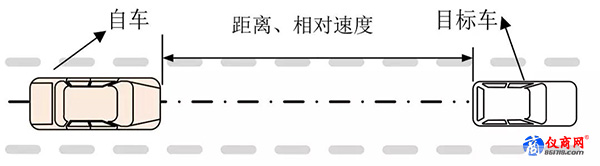
圖 2 跟隨目標信息檢測
ACC 系統通過獲得自車運動狀態(車速、加速度、轉向盤轉角)、駕駛員意圖(轉向盤轉角、油門踏板開度、制動踏板開度)等車輛內部狀態信息,進行車輛運動估計和駕駛員意圖估計,然后指導雷達、相機等傳感器進行信號處理和信息融合,提高識別的準確率和算法的運算效率,確定有效的跟隨目標 。確定有效目標后,獲得跟隨目標的距離、相對速度(相對自車)等信息,如圖 2 所示。
獲取目標車相對自車的距離與相對速度后,實時判斷當前的跟車距離是否安全,當判定當前的跟車距離小于安全跟車距離時,執行減速控制;反之,當判定當前的跟車距離大于安全跟車距離并且當前車速未達到設置的巡航車速時,執行加速控制。可見,合理決策安全跟車距離在 ACC 系統算法中非常關鍵。
2.2 基于駕駛員實際跟車特性的安全跟車距離
目前,ACC 算法中多數是利用跟車時間間隙計算安全跟車距離,即:
式中,v 為自車的速度;T 為跟車時間間隙。
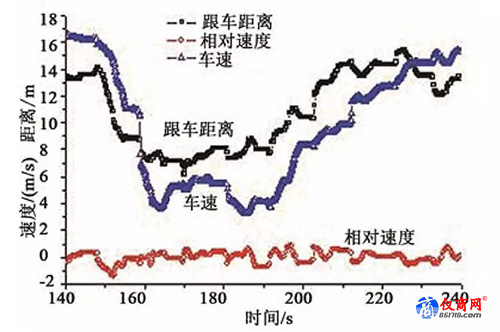
圖 3 駕駛員跟車數據
圖 3 為駕駛員跟車過程中記錄的一段數據,從圖中可以看出,在實際駕駛過程中,跟車距離不僅與自車車速相關,而且與目標車輛的相對速度趨勢關系密切,所以,僅依據自車的速度決策跟車距離是不完善的,需要考慮駕駛員的跟車特性 [4],提出一種新的充分考慮安全因素的決策安全跟車距離的算法。
根據加速度-位移公式:
可得,v_x 以減速度 a 從 v 減至 0,駛過的距離 s 與 v 滿足式(2)。

假設自車當前的車速為 v_x,m/s,目標車輛相對于自車的速度為 v_r,m/s,減速度常數為 a,m/s^2,自車從當前位置以減速度 a 進行制動,所需要的制動距離為:

式中,S_ego 為自車制動距離,m。
目標車輛從當前位置以減速度 a 進行制動,所需要的制動距離為:

式中,S_target 為目標車輛的制動距離,m。
如圖 4 所示,當目標車比自車慢,即 v_r < 0 時,若 2 車以同樣的減速度 a 同時開始制動,自車完全停止所需要的制動距離比目標車完全停止所需要的制動距離長 S_Delta,即:

即當目標車輛開始減速時,如果自車駕駛員能夠立即采取制動措施,那么需要 2 車制動前的距離不小于 S_Delta 才能保證 2 車剛好不相撞。在實際情況中,從前車開始制動到自車駕駛員開始采取制動措施之間,一定會存在一段時間間隔,定義這段時間為駕駛員的反應時間 T_r [5]。同時,圖 4 中為一種剛好不碰撞的臨界狀態,為提高安全系數,應該保證 2 車完全停止后,二者之間仍然存在一段距離,定義為停止距離 stopGap。
綜上,提出安全跟車距離公式為:

式(6)為考慮駕駛員特性的安全跟車距離與當前自車車速、不同駕駛員反應時間、自車與目標車相對車速的關系。特定的駕駛員,其反應時間可以作為其跟車特性指標。根據式(6),特定駕駛員(T_r 為常數)所對應的安全跟車距離如圖 5 所示。
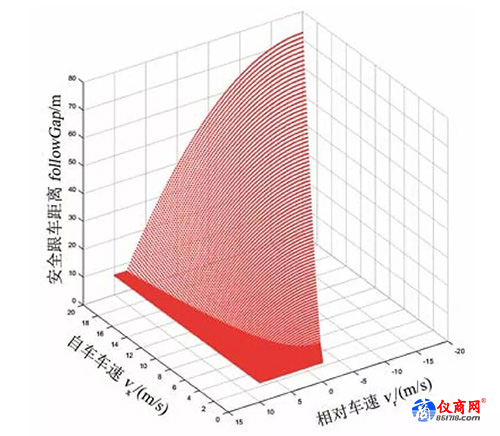
圖 5 安全跟車距離與自車車速和相對車速的關系
由圖 5 看出,安全跟車距離與自車車速正相關,與相對車速負相關。
3. 基于駕駛特性的 ACC 系統仿真分析
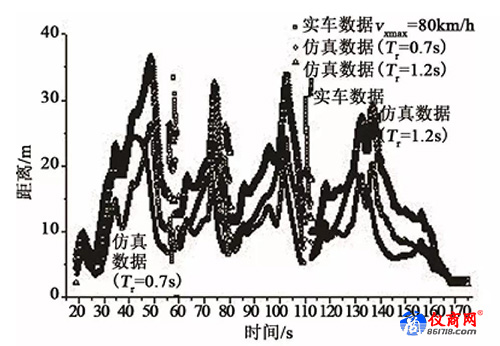
圖 6 不同反應時間下跟車距離與實際跟車距離對比
在實際駕駛過程中,將自車車速、目標相對車速作為式(6)的輸入,設定不同駕駛特性,即可獲得安全跟車距離與駕駛員實際跟車距離之間的關系,如圖 6 所示,給出了駕駛員反應時間為 0.7 s 和 1.2 s 時的曲線。從圖中可以看出,在接近前車、遠離前車、隨前車啟動和隨前車停止等工況下,式(6)的計算方法能夠比較好地與實際跟車距離貼合,并且通過駕駛特性參數的調整,能夠獲得不同特性的自適應巡航特征。
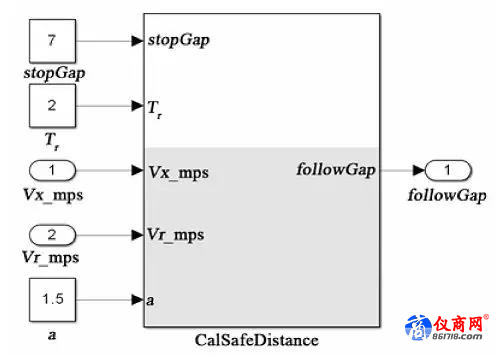
圖 7 Simulink 環境下安全跟車距離模型
將安全跟車距離模型在 Simulink 環境下進行搭建,并通過快速原型設備進行實車測試。測試過程中實時獲取目標車輛的相對距離、相對速度以及自車的速度,根據式(6)實時計算安全跟車距離。Simulink 環境下的模型如圖 7 所示。
其中,停止距離 stopGap 為 7 m,駕駛員反應時間 T_r 為 2 s,加速度常數 a 為 1.5 m/s^2。
4. 基于駕駛特性的 ACC 系統實車測試
4.1 實車測試環境

圖 8 ACC 開發平臺與測試場景
將安全距離計算方法集成到 ACC 模型中,并進行實車測試,測試平臺和測試環境如圖 8 所示。通過快速原型方式將算法下載到 AutoBox 中,接入毫米波雷達獲取目標距離、方位角、相對速度等障礙物信息,接入整車網絡獲取自車車速、轉向盤轉角等車輛狀態信息。通過制動減速度、發動機扭矩實現自車車速控制,從而保持安全距離。
4.2 實車測試數據分析
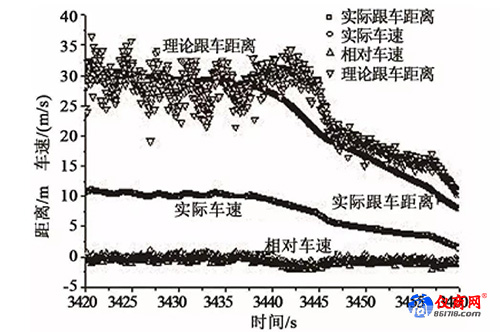
圖 9 實車測試結果
圖 9 為基于圖 7 的安全跟車距離進行自適應巡航的實車測試數據。從圖中可以看出,所提出的計算安全跟車距離的模型能夠為自適應巡航系統提供有效的控制目標,并與車速控制系統形成合理的閉環,及時響應速度與相對速度的變化,以此為依據進行后續控制能夠將自車與目標車之間的距離保持在合理范圍內。
5. 結論
分析跟車過程中的駕駛行為,結合前車運動、自車運動和駕駛員反應時間計算實際跟車過程中的理論安全距離,通過與實際跟車測試數據對比,發現模型能夠較好地擬合跟車過程,可用于自動駕駛或者自適應巡航系統的跟車距離決策,并且通過特征參數調整獲取不同駕駛/乘坐習慣,這使自適應巡航系統更加符合駕駛員的跟車行為,帶來更好的舒適性。