傳感器融合技術
簡單地說,傳感器融合就是將多個傳感器獲取的數據、信息集中在一起綜合分析以便更加準確可靠地描述外界環境,從而提高系統決策的正確性。
傳感器各有優劣,難以互相替代,未來要實現自動駕駛,是一定需要多個傳感器相互配合共同構成汽車的感知系統的。不同傳感器的原理、功能各不相同,在不同的使用場景里可以發揮各自優勢。
多傳感器融合是人工智能未來趨勢
多個同類或不同類傳感器分別獲得不同局部和類別的信息,這些信息之間可能相互補充,也可能存在冗余和矛盾,而控制中心最終只能下達唯一正確的指令,這就要求控制中心必須對多個傳感器所得到的信息進行融合,綜合判斷。
隨著機器人技術的不斷發展,智能化已成為機器人技術的發展趨勢,而傳感器技術則是實現智能化的基礎之一。

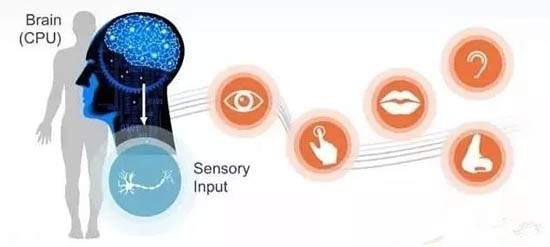
多傳感器融合技術理念
由于單一傳感器獲得的信息有限,且還要受到自身品質和性能的影響,因此智能機器人通常配有數量眾多的不同類型的傳感器,以滿足探測和數據采集的需要。若對各傳感器采集的信息進行單獨、孤立地處理,不僅會導致信息處理工作量的增加,而且,割斷了各傳感器信息間的內在聯系,丟失了信息經有機組合后可能蘊含的有關環境特征,造成信息資源的浪費,甚至可能導致決策失誤。為了解決上述問題人們提出了多傳感器融合技術。

多傳感器融合又稱多傳感器信息融合,有時也稱作多傳感器數據融合,于1973年在美國國防部資助開發的聲納信號處理系統中被首次提出,它是對多種信息的獲取、表示及其內在聯系進行綜合處理和優化的技術。它從多信息的視角進行處理及綜合,得到各種信息的內在聯系和規律,從而剔除無用的和錯誤的信息,保留正確的和有用的成分,最終實現信息的優化,也為智能信息處理技術的研究提供了新的觀念。
多傳感器融合技術有多精確
簡單的傳感器融合不外乎就是每個傳感器的數據能大致在空間跟時間上能得到對齊。而整個多傳感器融合技術的核心就在于高精度的時間以及空間同步。精度到什么量級呢?
舉個栗子,比如時間上能得到10的-6次方,空間上能得到在一百米外3到5厘米的誤差,這是一個典型的技術指標。
當然,多傳感器同步技術的難度與時間和空間的要求是一個指數級的增加。在百米外能得到3cm的空間精度,換算成角度是0.015度左右。

大家也知道在無人駕駛當中,毫米波雷達、相機、激光雷達和超聲波都是完全不同的傳感器,讓他們在時域跟空域上得到這樣的精度是非常難的,需要對機器人技術以及機器學習優化技術有非常深的理解。
自動泊車、公路巡航控制和自動緊急制動等自動駕駛汽車功能在很大程度上也是依靠傳感器來實現的。
多傳感器融合技術使用方式
重要的不僅僅是傳感器的數量或種類,它們的使用方式也同樣重要。目前,大多數路面上行駛車輛內的ADAS都是獨立工作的,這意味著它們彼此之間幾乎不交換信息。只有把多個傳感器信息融合起來,才是實現自動駕駛的關鍵。
現在路面上的很多汽車,甚至是展廳內的很多新車,內部都配備有基于攝像頭、雷達、超聲波或LIDAR等不同傳感器的先進駕駛員輔助系統(ADAS)

這些系統的數量將會隨著新法案的通過而不斷增加,例如在美國,就有強制要求安裝后視攝像頭的法案。此外,諸如車險打折優惠和美國公路交通安全管理局(NHTSA)、歐洲新車安全評鑒協會(Euro-NCAP)等機構做出的汽車安全評級正在使某些系統成為汽車的強制功能;另一方面,這也助長了消費者對它們的需求。
ADAS如何實現突破限制
目前,大多數路面上行駛車輛內的ADAS都是獨立工作的,這意味著它們彼此之間幾乎不交換信息。(沒錯,某些高端車輛具有非常先進的自動駕駛功能,不過這些功能還未普及)。后視攝像頭、環視系統、雷達和前方攝像頭都有它們各自的用途。通過將這些獨立的系統添加到車輛當中,可以為駕駛員提供更多信息,并且實現自動駕駛功能。不過,你還可以突破限制,實現更多功能——參見圖1。

ADAS以汽車內單個、獨立的功能存在
僅僅通過多次使用相同種類的傳感器無法克服每種傳感器的缺點。反之,我們需要將來自不同種類傳感器的信息組合在一起。工作在可見光譜范圍內的攝像頭CMOS芯片在濃霧、下雨、刺眼陽光和光照不足的情況下會遇到麻煩。而雷達缺少目前成像傳感器所具有的高分辨率。我們可以在每種傳感器中找到諸如此類的優缺點。
多傳感器融合技術中的“雷達”與“攝像頭”
傳感器融合這一想法的偉大之處在于獲得不同傳感器和傳感器種類的輸入內容,并且使用組合在一起的信息來更加準確地感知周圍的環境。

相對于獨立系統,這樣可以做出更好、更安全的決策。雷達也許不具有光傳感器所具有的分辨率,不過它在測距和穿透雨、雪和濃霧方面具有很大優勢。這些天氣條件或光照不足的惡劣情況不利于攝像頭發揮作用,不過攝像頭能夠分辨顏色(可以想一想街道指示牌和路標),并且具有很高的分辨率。
目前路面上圖像傳感器的分辨率已經達到1百萬像素。在未來幾年內,圖像傳感器的發展趨勢將是2百萬,甚至4百萬像素。
“雷達”與“攝像頭”相互融合
雷達和攝像頭是兩項傳感器技術完美融合、互為補充的典范。采用這種方法的融合系統所實現的功能要遠超這些獨立系統能夠實現的功能總和。
使用不同的傳感器種類可以在某一種傳感器全都出現故障的環境條件下,額外提供一定冗余度。這種錯誤或故障可能是由自然原因(諸如一團濃霧)或是人為現象(例如對攝像頭或雷達的電子干擾或人為干擾)導致。

即使是在一個傳感器失效的情況下,這樣的傳感器融合系統也可以保持某些基本或緊急的功能。完全借助報警功能,或者讓駕駛員時刻做好準備,從而接管對車輛的控制,系統故障也許就不那么嚴重了。
然而,高度和完全自動駕駛功能必須提供充足的時間讓駕駛員重新獲得對車輛的控制。在這段駕駛員接管車輛控制之前的時間范圍內,控制系統需要保持對車輛最低限度的控制。
多傳感器融合技術中的前融合、后融合

后融合算法典型結構
后融合算法:
1、每個傳感器各自獨立處理生成的目標數據。
2、每個傳感器都有自己獨立的感知,比如激光雷達有激光雷達的感知,攝像頭有攝像頭的感知,毫米波雷達也會做出自己的感知。
3、當所有傳感器完成目標數據生成后,再由主處理器進行數據融合。

前融合算法典型結構
前融合算法:
1、只有一個感知的算法。對融合后的多維綜合數據進行感知。
2、在原始層把數據都融合在一起,融合好的數據就好比是一個Super傳感器,而且這個傳感器不僅有能力可以看到紅外線,還有能力可以看到攝像頭或者RGB,也有能力看到LiDAR的三維信息,就好比是一雙超級眼睛。在這雙超級眼睛上面,開發自己的感知算法,最后會輸出一個結果層的物體。
數據融合的算法
雷達和攝像頭是兩項傳感器技術完美融合、互為補充的典范。采用這種方法的融合系統所實現的功能要遠超這些獨立系統能夠實現的功能總和。
使用不同的傳感器種類可以在某一種傳感器全都出現故障的環境條件下,額外提供一定冗余度。這種錯誤或故障可能是由自然原因(諸如一團濃霧)或是人為現象(例如對攝像頭或雷達的電子干擾或人為干擾)導致。
即使是在一個傳感器失效的情況下,這樣的傳感器融合系統也可以保持某些基本或緊急的功能。完全借助報警功能,或者讓駕駛員時刻做好準備,從而接管對車輛的控制,系統故障也許就不那么嚴重了。
然而,高度和完全自動駕駛功能必須提供充足的時間讓駕駛員重新獲得對車輛的控制。在這段駕駛員接管車輛控制之前的時間范圍內,控制系統需要保持對車輛最低限度的控制。