近年來,自動駕駛、網聯技術、新能源、共享出行是汽車工業的發展方向,尤其是自動駕駛,在全球和中國獲得了非常多的技術關注和資本支持。為了應對這個趨勢,西門子工業軟件在過去十年累計投入超過100億美元,做了很多技術研發的努力,包括并購一些公司,包括TASS International。基于這些工作,Siemens能夠提供智能網聯新能源車的整體解決方案。其中,TASS的主要技術領域包括兩個方面,一個是仿真技術,一個是測試和工程咨詢服務。
本文與大家交流的主題是基于模型的ADAS和自動駕駛系統開發和測試方法論。要配合自動駕駛汽車的性能開發,我們必須遵循從純模型的仿真、到半實物的仿真、到場地和道路測試這一正向開發流程。這一開發流程和方法價值何在呢?要對自動駕駛車輛進行充分的測試驗證,需要多達142億英里的路試,這顯然與有限的產品開發時間和生命周期是相悖的。這帶來一個經典的問題:究竟需要多少測試,才能證明自動駕駛產品是成熟可靠、可以上市的呢?
把這一問題細化,可以提出五個具體問題:
1.測試歷程和工況場景幾乎是無限的
2.嚴苛工況和全面工況在道路測試中可遇不可求
3.即使能遇到嚴苛工況,也不可重現,無法重復驗證
4.在道路上,缺乏真值數據來對比檢驗系統性能
5.部分測試工況具有危險性和復雜性
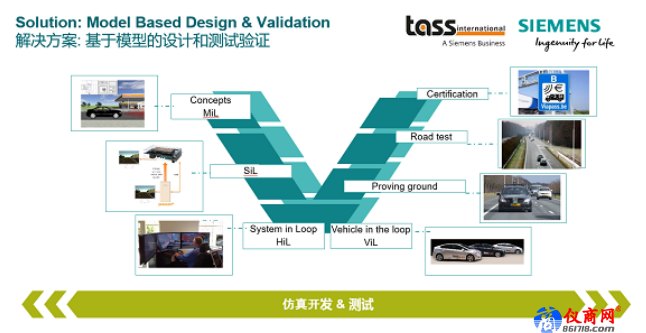
為了應對這些挑戰,我們提出了基于模型的設計和測試驗證方法。本文將通過一系列的實際工程案例,來具體闡發這一方法論。這一方法論的核心,是以PreScan為核心的仿真技術。基于這一仿真技術,可以進行MiL-模型在環,SiL軟件在環,HiL硬件在環,ViL車輛在環,直到場地測試和道路測試,從而構成完整的開發測試流程。
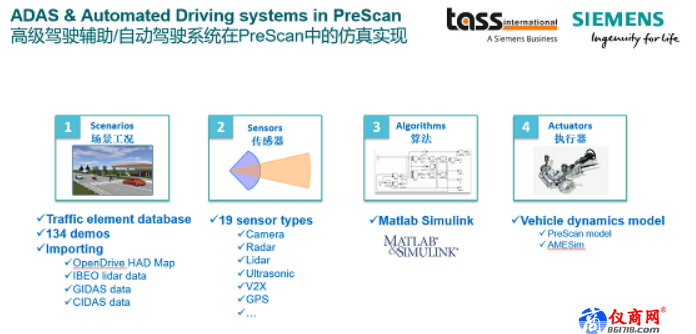
自動駕駛系統可以劃分為四個功能模塊,第一是測試工況,第二是環境感知的傳感器,第三是控制決策規劃的算法,最后是底盤執行器。PreScan仿真技術,可以對這四個功能模塊進行建模仿真,構成完整的自動駕駛系統的模型。
接下來為大家介紹幾個案例,來說明我們的方法論。
第一個案例是為北歐某OEM做的測試項目。我們知道,測試工況的種類、數量、覆蓋度對系統的測試至關重要,測試工況的來源有多種。本項目中,我們使用了德國GIDAS交通事故數據,PreScan可以自動的把GIDAS事故數據轉換成測試場景模型。有了場景工況的模型,再結合環境感知、控制算法、底盤動力學的模型,就會構成非常完整的系統仿真方案。GIDAS數據庫的場景非常多,所以我們提供了基于集群計算機服務器的計算方法,使得我們可以進行高效的大規模的工況計算。當然,今天PreScan也支持中國的交通事故數據庫CIDAS,這都是非常有價值的測試工況來源之一。
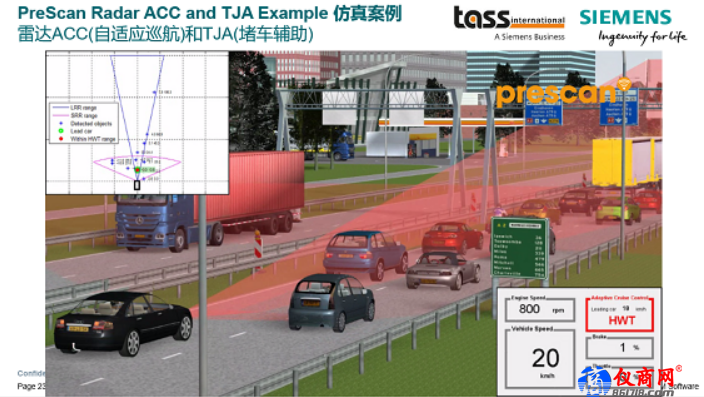
第二個案例是ACC的性能標定案例。ACC的測試,有一個典型工況,即所謂的Cut-In目標車突然變道到主車車道上的工況。構成這一工況有很多的元素,比如車速、切入的時機、切入之后目標車的狀態等等,如果各個元素的多種取值做排列組合,會發現這個單一工況可以輕易地衍生出幾十萬種組合。
有了這么多的工況,怎么樣進行ACC的性能分析呢?ACC系統有一個重要的性能參數就是加速度的變化率,即所謂的jerk,影響它的有很多參數,包括雷達傳感器的檢測延時、ACC控制算法包括PID參數的標定、執行機構對加減速的響應延遲和上升特性、底盤動力學的特性等,我們要想定量的分析決定優化的參數,靠路試的主觀評價是遠遠不夠的,必須通過模型和參數的分析來決定最優的參數組合。
當產品有了原型,就可以進行HiL硬件在環的測試,這里有一個我們給某日系主機廠和供應商提供的攝像頭LKA系統HiL項目案例。我們知道,要充分測試LKA系統的性能,需要在大量的、不同車道狀態組合的工況下進行測試。道路測試很難遍歷不同的車道組合,比如不同轉彎半徑的車道,難以在真實道路上都找得到。這時候,毫無疑問,能夠輕易定制測試工況的HiL的測試效率遠超道路測試。
下一個案例,我想分享我們使用仿真產生的場景數據用于AI人工智能算法的優化迭代,PreScan場景工況測試能夠基于Nvidia PX的人工智能算法,進行可行駛區域Free Space Detection,也可以用來測試3D SLAM算法。這其中,有兩個重要的技術點:
第一個,當今的人工智能駕駛技術越來越傾向于使用感知傳感器的原始數據進行數據融合,這也是PreScan環境感知傳感器的開發方向,盡量地提供原始數據輸出;
第二個,我們知道AI人工智能算法的訓練結果質量與測試工況的數量和覆蓋度相關,因此,為了彌補路采素材代表性不足的缺陷,可以使用仿真技術的路況可定制的優勢,生成仿真數據,加入訓練集中,可以提高算法訓練結果的質量。

當我們產品可以上市裝車的時候,車輛在環ViL就成為了一個手段。這是案例,是我們向上海某整車廠提供的基于毫米波雷達的ACC/AEB系統的ViL測試平臺。這樣的解決方案具有什么價值?以前,該主機廠主要是通過道路測試和主觀評價來進行性能的驗證,但這一手段具有一系列的缺陷。比如,測試工況沒有辦法去定制,定制之后很難精確的控制實現,實現之后也很難重現和重復測試,有時候,道路測試忙了一天,上百個測試工況下來,發現效果都不一定很好。而ViL車輛在環的方法順利的克服了上述難點,大大提高了測試效率。當然,PreScan也可以支持動態的駕駛模擬儀。
除了仿真測試技術,TASS也有豐富的道路測試經驗,我們是EuroNCAP組織授權的官方試驗場,有豐富的AEB/LDA/ISA等系統的法規測試經驗。在TASS荷蘭,我們還運營著基于7公里高速公路的自動駕駛試驗場,這是全球最早的自動駕駛道路試驗場。
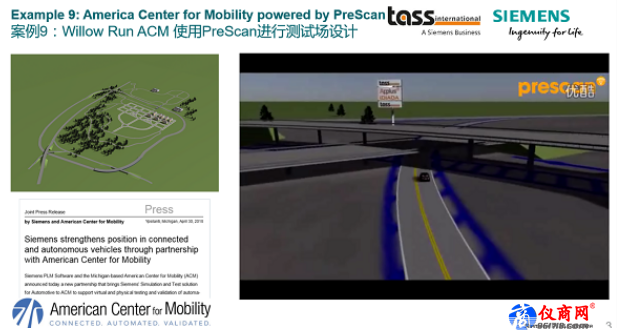
基于此,我們也能輸出自動駕駛試驗場的設計技術。比如,在美國密西根大學的Mcity,就曾經使用PreScan進行試驗場的可視化設計和仿真測試應用。在ACM-America Center for Mobility,TASS向其提供了場地設計咨詢服務,Siemens和TASS也是ACM的緊密合作伙伴。
今天通過一些實際的案例,闡述了基于模型和以PreScan仿真技術為核心的自動駕駛系統正向開發、測試流程。
雖然仿真技術作為一種工具,帶來了很大的價值,但是也有很多的技術難點,我們可以舉幾個例子。
第一是場景的渲染能力,這是當前PreScan場景渲染質量的示意圖例,下一步我們會進一步提升我們的渲染能力,不排除利用Unreal等游戲引擎進行場景渲染,提高場景渲染質量。

第二,我們計劃逐步把測試工況里面的所有元素參數化,并將參數開放,可以用外部程序來控制,從而可以輕易地獲得自動生成的、大量的、不同類型的測試工況。
第三,環境感知傳感器的建模能力需要對傳感器物理原理的大量先驗知識和經驗,這也是PreScan仿真技術一直在全球領先的重要技術之一。
以攝像頭為例,我們可以仿真從光源、傳播媒介、目標表面材質、光進入鏡頭、到達成像器件、甚至后續的AD轉換等等成像的所有物理環節。最終的實際效果是非常好的。
以毫米波雷達為例,我們知道毫米波雷達的感知特性,首先是感知精度和分辨率的問題,然后是目標的反射回的能量的問題,隨后還有一系列的常見缺陷特性:漏檢測、誤檢測、目標分列、過大的延遲等問題。我們還計劃發布對雷達天線發射和接收端的性能模型。
以激光雷達為例,PreScan可以建立其感知模型并輸出目標級別、或點云級別的結果。同時,還提供單獨的點云傳感器模型。

本文所分享的技術和案例充分表明,基于模型的自動駕駛系統性能開發的正向流程,必須經歷從純模型仿真、半實物仿真、受控場地測試和道路測試這一流程,才是符合工程實際的、效用合理的過程,這構成了今天的主題:基于模型的自動駕駛性能測試和開發流程。
自動駕駛的技術浪潮洶涌,希望西門子-TASS通過完整的仿真開發工具和解決方案,為自動駕駛產品開發提供良好的支撐,大家攜起手來,共同成為自動駕駛技術浪潮中的一分子。