復雜的高級駕駛輔助系統(ADAS)和自動駕駛(AD)功能(例如自動緊急剎車功能、自適應巡航控制和高速路自動駕駛) 需要在所有可能的駕駛場景和環境條件下進行大量功能和非功能性驗證。若沒有進行大量驗證,汽車一旦上路,就很容易發生危險。

繼早前GNSS衛星導航模擬器成功合作之后,羅德與施瓦茨公司和全球領先的汽車測試系統供應商AVL再次深化合作:雙方將羅德與施瓦茨公司的雷達測試系統集成至AVL DRIVINGCUBE?工具鏈,為測試基于雷達的ADAS解決方案提供更多可能性,同時也有可能提高自動駕駛功能在環仿真測試的有效性。目前,各種復雜駕駛場景均可在安全可重現的環境中生成和測試。
使用X-in-the-loop(XIL)仿真測試方法的AVL DRIVINGCUBE?測試平臺,通過底盤測功機或動力總成轉鼓將仿真環境和實際車輛結合在一起,從而提供了一種加快驗證和批準ADAS和自動駕駛系統功能的新方案。該解決方案的關鍵概念是在虛擬環境中操作真實的車輛,通過尖端仿真技術和汽車傳感器將虛擬顯示與真實世界進行連接,同時要考慮“傳感,決策,執行”這一鏈條的所有環節。
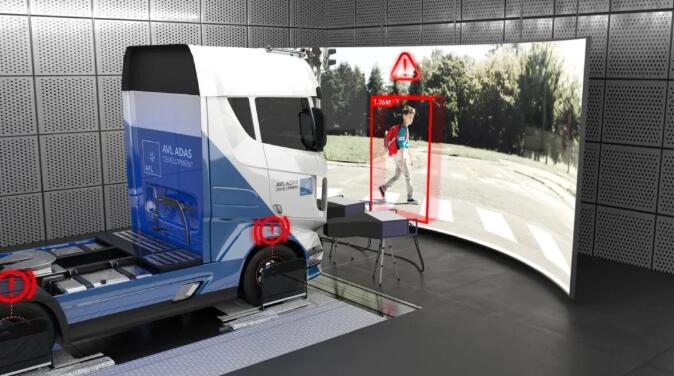
兩家公司基于AVL DRIVINGCUBE?方案進行雷達目標模擬的測試合作。
羅德與施瓦茨雷達測試系統為測試基于雷達的ADAS功能開辟了全新的可能性,同時也提高了自動駕駛功能在環仿真測試的安全性。創新的天線陣列技術在不移動天線或設備的情況下,能夠為雷達生成可變距離,可變的徑向速度、尺寸和方位的復雜模擬目標。借助快速響應的實時界面以及與AVL虛擬測試工具鏈的無縫集成,甚至可以生成具有挑戰性的復雜且危險的駕駛場景并進行測試。
該系統采用模塊化和可擴展的概念,因而可用于面向未來的汽車測試。這意味著同一測試臺可測試具有不同數量的雷達傳感器和其他各種傳感器類型的所有車輛。該解決方案可用于自適應巡航控制(ACC)、車道保持輔助(LKA)和其他ADAS或自動駕駛功能的驗證和應用。此外,可以在可重現和安全的環境中驗證NCAP方案。
AVL和羅德與施瓦茨之間的戰略合作提供了一種變革性的解決方案,為加快智能網聯功能驗證速度鋪平了道路。