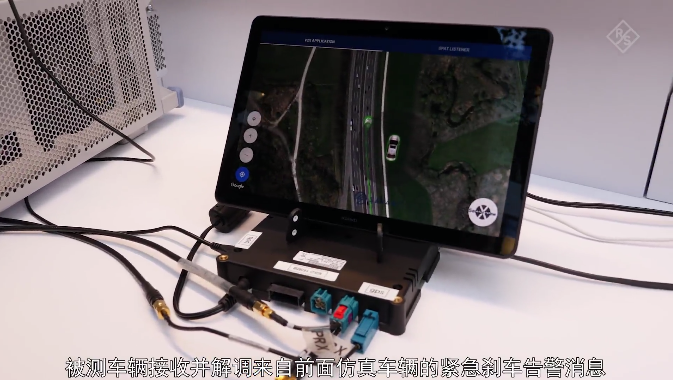
羅德與施瓦茨聯合Vector演示了C-V2X 典型交通場景測試,該系統由R&S®CMW500網絡仿真器和R&S®SMBV100B GNSS信號發生器硬件與Vectors CANoe.Car2x和DYNA4(整車和道路環境仿真軟件)組成的C-V2X測試組件構成。這種靈活的C-V2X交通場景測試解決方案有助于節省部署蜂窩V2X的時間和成本。

多年以來,汽車制造商和政府機構一直在探尋方法以提高道路安全性和有效管理交通流量。無線通信系統在不斷發展,車與車 (V2V) 和車與路側單元 (V2I) 通信的愿景正在成為現實。這些計劃用于車聯網 (V2X) 通信的汽車電子無線通信系統被統稱為智能運輸系統 (ITS)。首批解決方案基于 IEEE 802.11p 技術,但現在出現了基于 LTE 的蜂窩車聯網 (C-V2X) 解決方案,并且業界早已針對 5G 將如何發揮作用而展開了討論。

雷達傳感器、攝像頭和轉速計等完善的車輛傳感器已可提供有關距離、環境和速度的信息,但是將車輛信息傳輸給其他系統還有助于了解重要的交通狀況和碰撞情況,以便駕駛員或汽車可以啟用對策以避免發生事故,或改善交通流量情況。
車與車 (V2V) 通信系統需要穩定的無線鏈路,以最大限度地提高信息吞吐量,從而提高駕駛員的安全。為了確保良好的無線鏈路,即使在最糟糕的條件下(例如低信噪比 (SNR)、誤差矢量幅度 (EVM) 較差以及重度衰落),接收機也必須能夠檢測到信號。在實驗室中復現這些條件需要使用高性能測試設備,以便能夠生成/分析 V2X 信號、所需的衰落條件以及實現高精度定位的衛星信號。